Determinación de los esfuerzos producidos por flexo-torsión Caso de estudio: Análisis de las vigas metálicas de un puente grúa
Efforts in beams subjected to torsion and bending Case: Analysis of steel beam bridge-crane
Carlos R. Vallecilla Bahena1, Myriam R. Pallares Muñoz2 y Julián A. Pulecio Díaz3
Resumen:
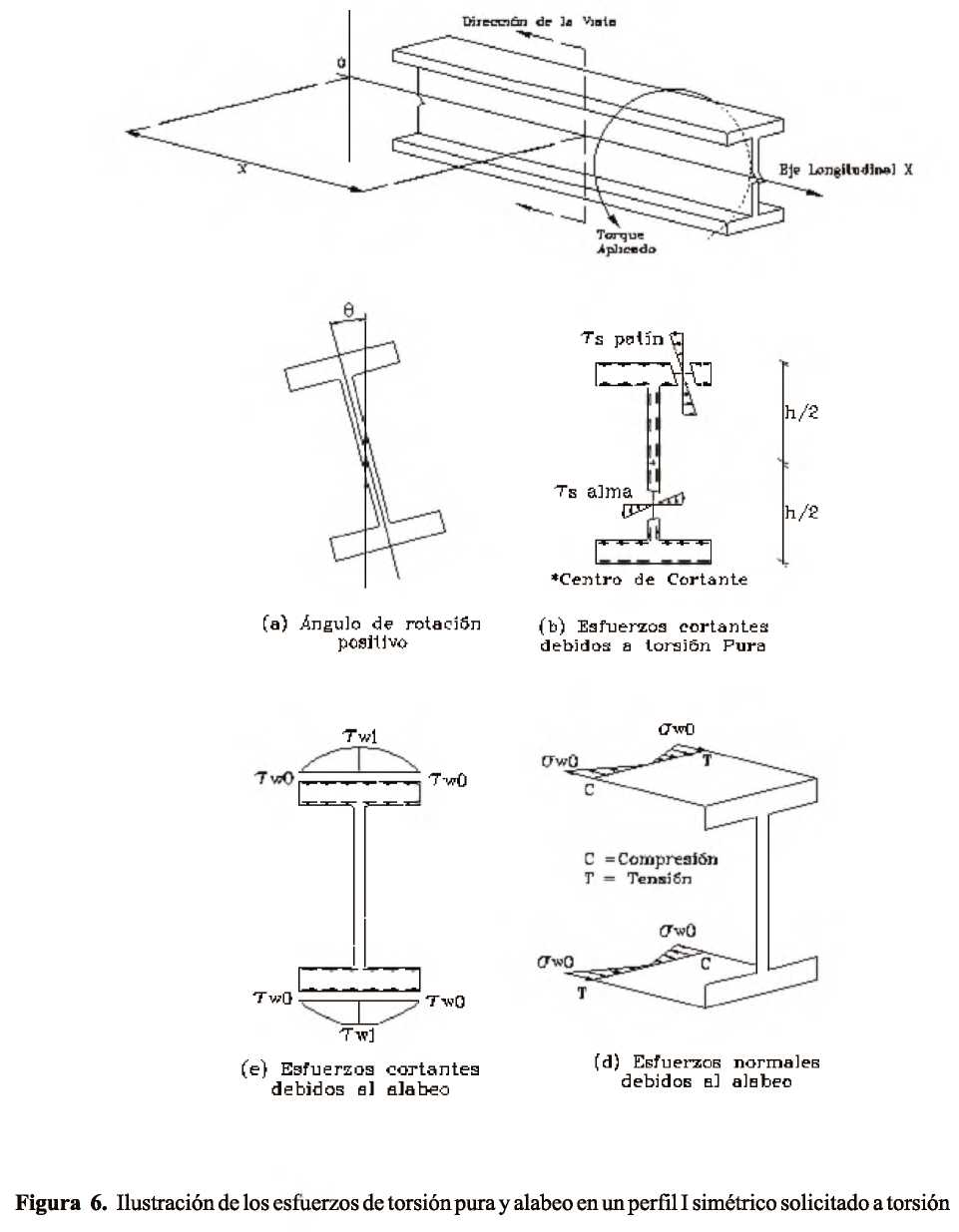
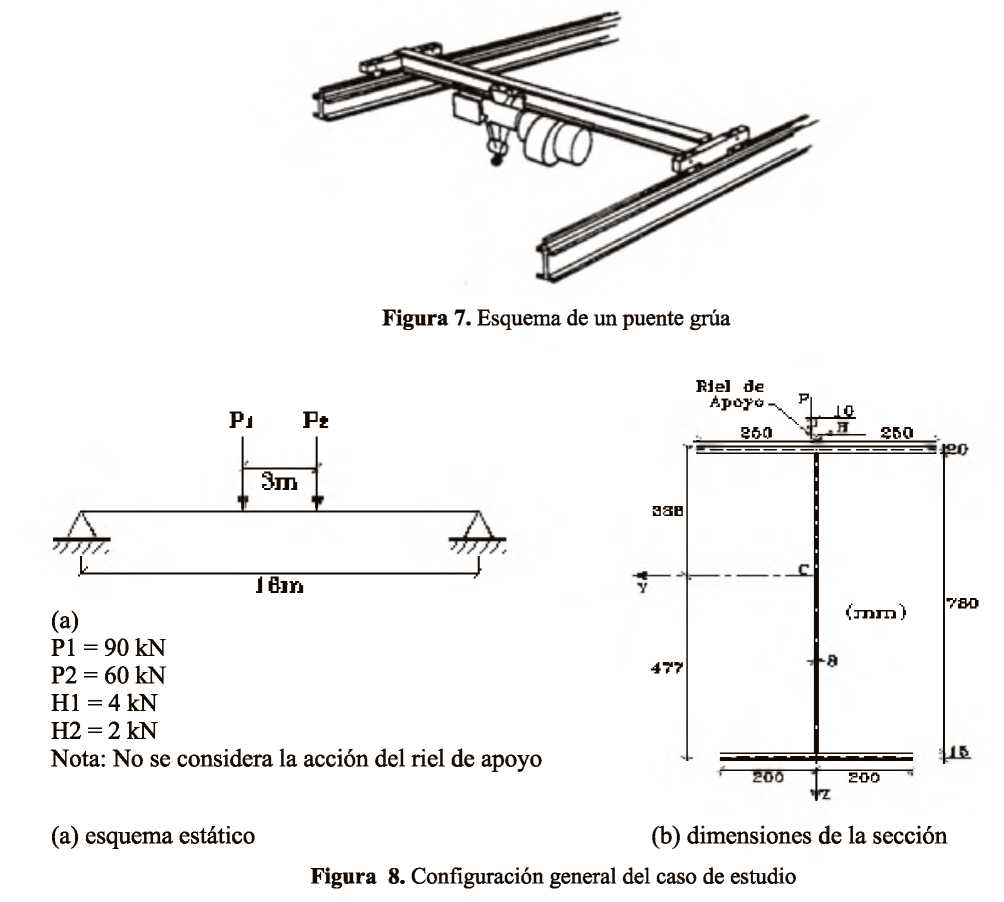
En toda estructura se originan esfuerzos debidos a torsión cuando la resultante de las fuerzas no pasa a través del centro de cortante de la sección. A su vez el centro de cortante tiene una doble significación: por una parte es el punto donde debe aplicarse la resultante de cargas para que una estructura se desplace sin rotar y por otra, es el punto con respecto al cual una estructura gira cuando es sometida a momentos torsionales. Normalmente, ocurren solicitaciones debidas a la torsión de Saint Venant y a la torsión de alabeo. La diferencia fundamental entre ellas, radica en la forma como se distorsiona la sección. Mientras las primeras, se caracterizan por la presencia de esfuerzos cortantes en el plano de la sección, en las segundas aparecen además, desplazamientos en el sentido longitudinal de la estructura, que se traducen en la presencia de esfuerzos normales. Para ilustrar las características de la torsión de alabeo se reporta en el presente artículo un caso de diseño de un puente grúa en estructura metálica, que se encuentra sometido a la acción de un tren de cargas móviles. Con esta elección, se desea mostrar la aplicación de la teoría de las áreas sectoriales en la determinación de los esfuerzos debidos a la torsión de alabeo en una construcción de la práctica diaria de un ingeniero diseñador de estructuras.
Palabras clave: torsión; teoría de áreas sectoriales; alabeo; centro de cortante; momento de inercia sectorial; funciones torsionales; esfuerzos cortantes debidos a la torsión de alabeo.
Abstract:
In all structures stresses due to torsion are originated when the resultant of the forces doesn't cross by the shear center of the section. Shear center as well has one double meaning: on the one hand it's the point where the resultant of loads must be applied so that a structure moves without rotating and by another one, is the point with respect to which one structures rotate, when it's put under torsional moments. Normally, solicitations due to the Saint Venant Torsion and the Warping Torsion, occurring. The fundamental difference among them is in the form as the section is distorted. While first, they are characterized by the presence of the shear stresses in the plane of the section, in second appear in addition, displacements in the longitudinal direction that are translated in the presence of normal stresses. In order to illustrate the characteristics of the Warping Torsion a case of design of a bridge crane in metallic structure is reported in the present article, that is put under the action of a train of live loads. With this election, it's desired to show the application of the theory of the sectorial areas in the determination of the stresses due to the Warping Torsion in a construction of the daily practice of an engineer designer of structures.
Keywords: torsion; sectorial area; warping torsion; shear center; sectorial moment; torsional functions and shear stresses due to warping torsion.
1. Introducción
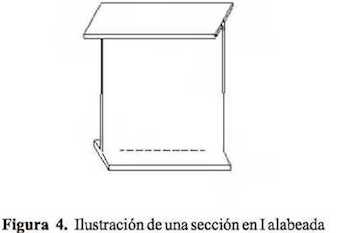
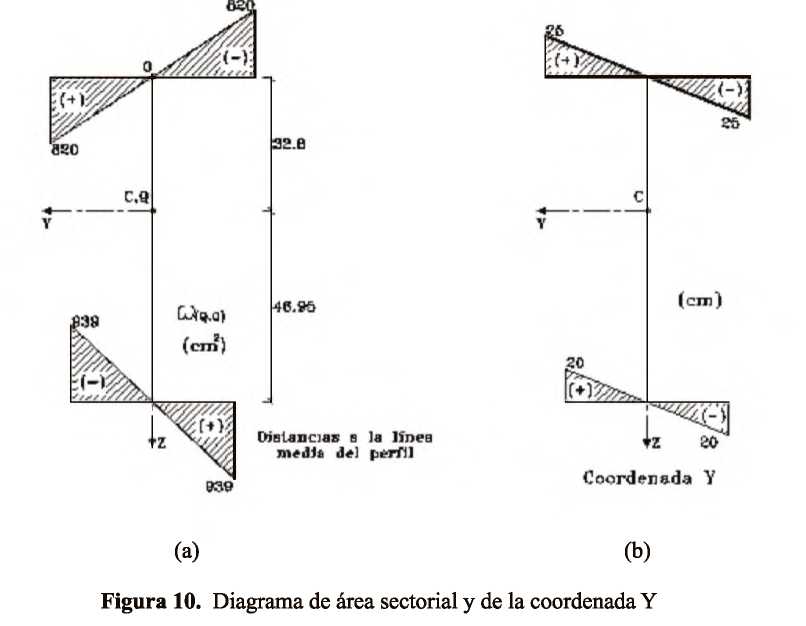
El desconocimiento que en ocasiones existe en el medio ingenieril, de los esfuerzos causados por la torsión, indica la necesidad de llevar a cabo un estudio detallado de estas solicitaciones, sus características y efectos sobre las construcciones. Las secciones de pared delgada, tales como perfiles metálicos, muros de cortante en edificios y puentes de sección abierta y cerrada, demandan un estudio cuidadoso de las solicitaciones generadas por la torsión (Vallecilla, 2005). En particular, interesan los esfuerzos producidos por el alabeo de la sección, es decir, por el desplazamiento de los puntos de esta a lo largo de su eje longitudinal. Si el desplazamiento se encuentra impedido, se generan, además de los esfuerzos cortantes, esfuerzos normales a lo largo de la sección, cuya obtención es esencial para la seguridad de la construcción (Monleón, 1999). Este trabajo trata la torsión de Saint Venant y la de alabeo, la determinación de las propiedades torsionales de una sección típica en ingeniería (perfil I asimétrico) y la obtención de la posición del centro de cortante, entre otros, reportados a través de un caso típico de estudio. Una discusión completa de la teoría torsional está más allá del alcance de esta publicación, no obstante, en los siguientes apartados se presenta una breve discusión para describir el método de análisis usado.
Una cobertura más detallada de la teoría torsional y de otros asuntos, está disponible en las referencias dadas.
2. Métodos
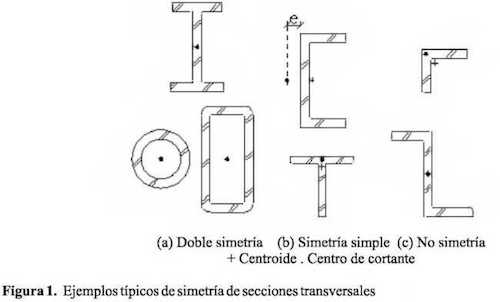
La torsión es la rotación de un miembro alrededor de su eje longitudinal y ocurre cuando la resultante de las fuerzas aplicadas no atraviesa el centro de cortante de la sección (Vlassov, 1948). Por su parte, el centro de cortante es el punto por el que deberían pasar las cargas aplicadas para que produzcan flexión sin originar torsión. Si una sección tiene un eje de simetría, el centro de cortante siempre está sobre dicho eje; para secciones transversales con dos ejes de simetría, dicho centro se encuentra en la intersección de estos (al igual que el centroide) (Ortiz, 2002). De acuerdo a los ejemplos ilustrados en la figura 1 a, el centroide y el centro de cortante coinciden en secciones doblemente simétricas. Las secciones con un solo eje de simetría tienen su centro de cortante sobre este eje, pero no necesariamente en el centroide. En la figura 1 b, se señala el centro de cortante para secciones tipo canal. En ellas, el centro de cortante se encuentra ubicado a una distancia e de la cara del canal. Por su parte, el centro de cortante de una sección tipo T está en la intersección de las líneas centrales del ala y el alma. La localización del centro de cortante para las secciones asimétricas tales como ángulos (L) y formas tipo Z se muestran en la figura 1 c.