Figura 1. Representación puntual de un dinagrama
|
|
|
|
José Sagado1, Rugo Bernal2 Alexander Zambrano3 Fauricio Romero4 Leonardo Franco5 Carlos Pérez6
Resumen
La acertada identificación de problemas de fondo es esencial en el bombeo mecánico para lograr una producción óptima y reducir los costos de operación y mantenimiento. Es necesario desarrollar y aplicar metodologías que permitan identificar de forma rápida problemas que puedan afectar la operación. La condición mecánica y desempeño del equipo de fondo (sarta de varillas, bomba, válvulas, etc.) y las propiedades físicas del pozo, como sumergencia de la bomba, interferencia de gas y fugas en las bombas, pueden ser evaluadas utilizando cartas dinagráficas. En este trabajo se presenta una metodología de análisis de fallas y condiciones de operación del sistema de bombeo, que incluye el desarrollo de un software de análisis basado enredes neuronales para identificar problemas en el sistema usando dinagramas de fondo. El sistema desarrollado permitió identificar un conjunto de los problemas más comunes con una alta precisión y es una herramienta que podría asistir a ingenieros y personal de operaciones en los trabajos diarios en sistemas de bombeo mecánico. Adicionalmente, fue desarrollada una funcionalidad básica para identificar las cartas más cercanas de acuerdo a características estadísticas y geométricas, la cual puede ser usada como punto de partida para desarrollar un sistema inteligente para predecir potenciales fallas a futuro.
Palabras Clave: Redes Neuronales; Dinagramas de Fondo; Red Backpropagation; Bombeo Mecánico.
Abstract
Successful identification of downhole problems is essential in mechanical pumping to achieve optimum production and to minimize operating and maintenance costs. It is necessary to develop and apply methodologies that allow fast identification of problems which affect production. The mechanical condition and performance of the downhole equipment (rod string, pump, valves, etc.) and physical properties of well like pump submergence, gas interference, pump leaks, etc, may be evaluated using dynamometer charts. In this work a fault analysis and operation conditions methodology for pumping system is presented; this includes the development of analysis software based on neural networks to identify system problems using downhole dynamometer charts. The developed system allowed to identify a set of the most common problems with a high precision and is a tool that could assist engineers and operations personnel in day to day oilfield works in rod pumping. Additionally, a basic functionality was developed to identify nearest charts according to statistical and geometric features, which can be used as the starting point to develop a smart systemto predict potential faults in the future.
Keywords: Neural Networks; Downhole Dynamometer Charts; Net Backpropagation; Mechanical Pumping.
1. Introducción
El bombeo mecánico es un método utilizado para el levantamiento artificial en la industria del petróleo cuyo objetivo es generar una buena producción al mínimo costo posible, para este propósito es indispensable asegurar un desempeño óptimo del sistema aplicando técnicas de mantenimiento predictivo, preventivo y correctivo de forma oportuna a las estructuras y equipos involucrados. Las cartas dinagráficas son ampliamente utilizadas para análisis diagnóstico y en el diseño de sistemas de bombeo mecánico, lo cual las hace herramientas muy valiosas para el trabajo de un intérprete experto (Svinos, 1998).
La inteligencia artificial es una herramienta poderosa en gran diversidad de campos y con muy buenos resultados en interpretación, identificación, búsqueda y toma de decisiones. Las redes neuronales son una forma de inteligencia artificial o software inteligente cuya implementación puede permitir la identificación de cartas dinagráficas, gracias al amplio conocimiento que se tiene hoy en día de estas (Orozco, 2005).
La técnica de reconocimiento de patrones utilizando redes neuronales se basa en el funcionamiento del cerebro humano y la interacción de las neuronas que son capaces de aprender y tomar acertadas decisiones, por lo cual al ser aplicado al análisis de cartas dinagráficas de fondo pueden permitir la obtención de un análisis más preciso y en muy corto tiempo para un diagnóstico más eficaz y eficiente (Heaton, 2008).
El entorno Matlab permite la implementación de redes neuronales para identificar las cartas dinagráficas de fondo correspondientes al sistema de bombeo mecánico que se desea diagnosticar y obtener un porcentaje de predicción del estado más cercano ola carta dinagráfica más cercana a la cual se tomó la correspondiente lectura.
2. Metodología
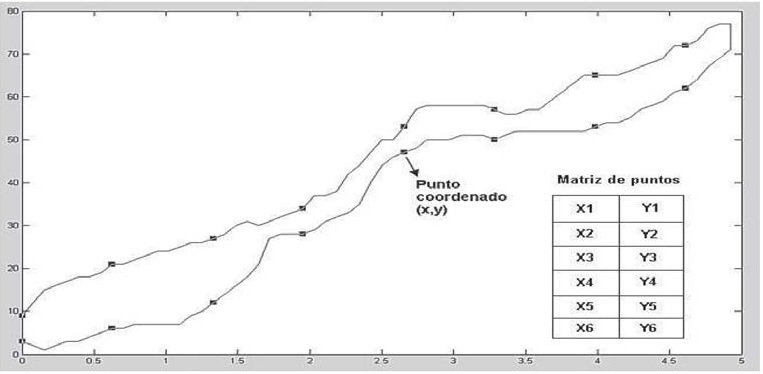
El dinagrama de fondo, objeto de estudio y procesamiento, es presentado en archivos planos digitalizados. Un archivo plano es la representación puntual de un plano, es decir, una matriz de parejas de coordenadas de puntosen un plano;unejemploclaroes el mostrado en la Figura1.
Para poder distinguir las diferentes clases de cartas dinagráficas es necesario determinar características que reflejen, en un único dato por característica, las diferencias existentes tanto en forma como en dispersión de los datos pertenecientes a cada dinagrama. Para seleccionar las características principales se evaluó un conjunto de características geométricas y estadísticas de 30 dinagramas de una base de datos proporcionada por el Ph.D Alexander Zambrano de la empresa RESERVOIR TECNOLOGY. Mediante el cálculo de la varianza de dichas características normalizadas, de 25 se seleccionaron 18, las cuales presentaron un valor grande de varianza y con las cuales no se exige demasiado gasto computacional.
Las características seleccionadas específicamente son las siguientes:
Figura 1. Representación puntual de un dinagrama
Para el desarrollo del software se implementó una red tipo Backpropagation debido a que la aplicación requería de una distribución de diferentes dinagramas conocidos, relacionando cada uno con una clase que en el caso específico es un número entero iniciando desde el número uno (1) hasta el número de dinagramas clasificados. La inteligencia artificial de la red neuronal permite una distinción de formas y a cada forma se le asigna una clase, la cual correspondea una falla definida por la carta dinagráfica de fondo. El sistema normaliza cada dinagrama que ingresa, extrae sus 18 características y luego identifica la clase a la cual pertenece este dinagrama (Acosta y Zuluaga, 2000).
Solo se definen algunas clases que representan una diferente falla en los equipos de fondo ya que en un pozo es poco común ver todas las posibles fallas que se interpretan y diagnostican con una carta dinagráfica de fondo. Las características permiten diferenciar entre las clases establecidas y estos patrones activan en la salida de la red lactase a la cual se ajusta más, producto del entrenamiento (Tackas,1993).
Basado en la experimentación y la correlación del comportamiento de la red neuronal evaluada con diferentes tipos de topologías, se propone la selección de tres capas. En donde el número de neuronas en la primera capa corresponde al número de clases asignadas por el diseñador según los dinagramas de fondo definidos, el número de neuronas en la segunda capa corresponde al número de características extraídas y el número de neuronas en la capa de salida corresponde a la clase identificada que siempre será un número entero.
En la Figura 2 se muestra un ejemplo de las siguientes topologías tratadas:
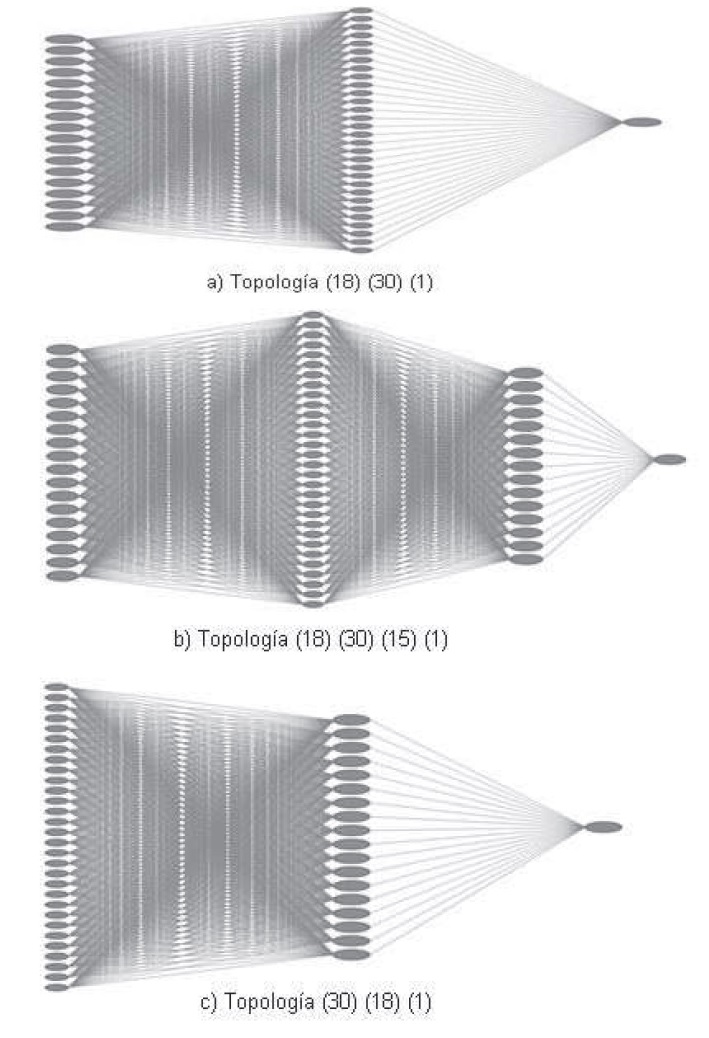
Figura 2. Topología de red Backpropagation
2.1 Configuración de la red neuronal Se logró determinar en Matlab que la función Tansig produce una mayor eficiencia como función de transferencia en la primera capa de la red, debido a que la entrada es un conjunto de características cuyos valores son números enteros con valores positivos y negativos. Esta función efectúa una comprensión del espacio de soluciones mejorando entrenamiento de la red e incrementando su velocidad de convergencia. Por el contrario, al implementar la función Logsig en esta capa, se comprime el espacio de soluciones a componentes únicamente positivo eliminando soluciones que pueden dar una mejor adaptación a la red durante su entrenamiento. Lo que se estima al comprimir de tal forma que espacio de solución es que no se tenga en cuenta valores de vital importancia para conseguir un óptimo entrenamiento para la aplicación buscada (Beale et al. 2010).
Teniendoen cuenta que las clases definidas para los dinagramas de fondo son números enteros positivos, la función de transferencia para la segunda capa en Matlab que comprime el espacio de soluciones restringiéndolo a valores positivos es la función Logsig, mejorando el desempeño de la red. La función Tansig en este caso es inapropiada ya que permite salidas negativas, las cuales no coinciden con las clases asignadas.
En la tercera capa se encuentra salida y se maneja una función lineal llamada en Matlab como Purelin, en donde la entrada es igual a la salida. Esta única salida representa la clase con la cual se identifica el dinagrama que entra a la red neuronal por la extracción de sus características.
La Figura3 muestra la configuración adecuada de la función de transferencia para cada capa:
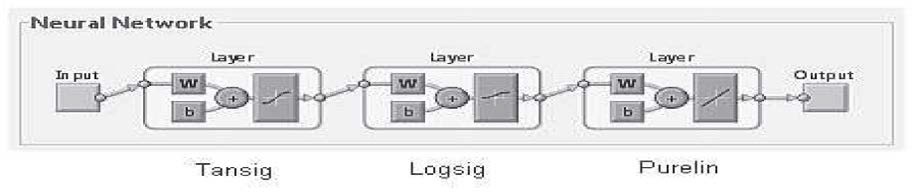
Figura 3. Función de transferencia por capa
El algoritmo de entrenamiento recomendado para esta aplicación es el de Levenberg-Marquarst, por su rendimiento, velocidad y convergencia en este tipo de aplicación específica.
2.2 Software de identificación de fallas en el bombeo mecánico a partir de dinagrama de fondo
Este software es una red neuronal entrenada para identificar fallas asociadas con el dinagrama de fondo de un sistema de bombeo mecánico, posee una interfaz gráfica en donde el analista u operario puede visualizar todas las diferentes formas de cartas dinagráficas que se presentan en un campo particular con múltiples pozos. Esta forma de interfaz permite relacionar formas con nombres de fallas brindándole al operario una base de conocimiento en interpretación de dinagramas que es muy útil en caso de que los sistemas computacionales o la energía eléctrica que permite su funcionamiento fallen por alguna razón inesperada (Russel, 1995).
El software diseñado para identificar dinagramas de fondo se llama Dinasoft, el cual maneja 16 fallas diferentes, de las cuales 4 se tomaron de los ejemplos que contiene el software TWM de la empresa ECHOMERTER y 12 fueron dados por el Ph.D Alexander Zambrano de la empresa RESERVOIR TECNOLOGY y validado por el ingeniero de petróleos, especialista en bombeo mecánico y experto en dinagramas, Fauricio Romero de la empresa ECOPETROL S.A.
En total son 20 dinagramas, a los cuales se le adiciono ruido sinusoidal y aleatorio para hacer 14 deformaciones diferentes a cada uno de los 20 dinagramas seleccionados para el entrenamiento y validación de la red neuronal. La población total de dinagramas es de 300, de los cuales aplicando los porcentajes descritos para la validación simple se tienen: 200 dinagramas para el entrenamiento de la red neuronal, 40 dinagramas para su validación y 60 dinagramas para el test.
Adicionalmente como herramienta de análisis y expansión del entorno de situación este programa muestra las fallas denominadas por el diseñador como los vecinos más cercanos. Esto permite tener un panorama completo de la situación del pozo ya que no solo identifica la falla en fondo sino que muestra una serie de fallas cercanas a la actual con diferentes grados de probabilidad de ocurrencia con las cuales se puede prevenir un daño de mayor proporción según el caso.
Tabla 1. Clases asignadas a los dinagramas
| CLASE | NOMBRE DE FALLA | N° |
| 1 | Bomba normal | 1 |
| 2 | Bomba desgastada | 1 |
| 3 | Pistón golpeando arriba de la bomba | 1 |
| 4 | Válvula fija mala | 2 |
| 5 | Bomba viajera mala | 2 |
| 6 | Bomba mala | 2 |
| 7 | Pistón golpeando por abajo | 1 |
| 8 | Falla en barril | 1 |
| 9 | Suciedad de la bomba | 1 |
| 10 | Golpe de fluido | 2 |
| 1 | Tubería sin anclar | 1 |
| 12 | Interferencia de gas | 1 |
| 13 | Golpe de fluido con fricción y movimiento de tubería | 1 |
| 14 | Pistón pegado sin sobrepasar el límite elástico de las cabillas | 1 |
| 15 | Agujero en el cilindro de la bomba | 1 |
| 16 | Cabillas partidas | 1 |
2.3 Interfaz gráfica de Dinasoft
Esta es de muy fácil manejo y puede ser ejecutada por cualquier persona con conocimientos básicos de Matlab. El código desarrollado en Matlab se puede implementar en otro lenguaje gracias a que no usa muchos comandos propios, ya que la gran mayoría del código computacional está en lenguaje C, permitiendo extraer la red neuronal como una función que se implementa en forma de sumas y multiplicaciones.
La interfaz gráfica está hecha con el GUI de Matlab y todo su entorno principal se observa en la Figura 4 y la Figura 5.
Figura 4. Pantalla de ingreso a Dinasoft
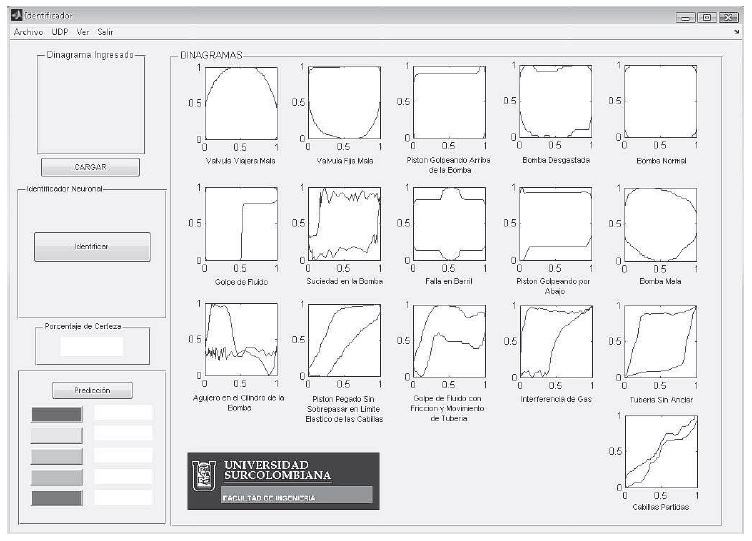
Figura 5. Pantalla principal de Dinasoft
3. Resultados
De las diferentes pruebas que se practicaron para determinar la topología adecuada de red se escogieron las 3 más representativas, mostrando sus resultados en la Tabla 2.
Tabla 2. Análisis de resultados
| TOPOLOGÍA | N° DE PRUEBAS | ACIERTOS | ERRORES | MEJOR TOPOLOGÍA |
| (18)(30)(1) | 56 | 32 | 24 | |
| (18)(30)(15)(1) | 56 | 38 | 18 | |
| 30)(18)(1) | 56 | 46 | 10 | X |
En las pruebas se ingresaron a la red tanto dinagramas conocidos como desconocidos, los errores mostrados en la Tabla 2 son producto de la inadecuada identificación de la red, causa de la ausencia de la falla en el conjunto de entrenamiento. Estos errores se estimaron para probar la robustez de la red y observar su comportamiento de identificación de formas, ya que, aunque la falla es desconocida la red la asocia a la forma más cercana conocida.
La Tabla 3 consigna los resultados obtenidos en la pruebas con los tipos de entrenamiento.
Tabla 3. Datos obtenidos con los diferentes métodos de entrenamiento
| TIPO DE ENTRENAMIENTO | PERFORMACE | GRADIENT | ITERACIONES | AJUSTE |
| Trainbfg | No alcanzado | 0.044426 | 595 | 0.084802 |
| Trainrp | No alcanzado | 0.000863 | 20000 | 1 |
| Traingdx | No alcanzado | 0.37468 | 20000 | 0.99974 |
| Traingd | No alcanzado | 1.6167 | 20000 | 0.99988 |
| Trainlm | Alcanzado | 0.003720 | 52 | 1 |
| Traingdm | No alcanzado | 0.008734 | 20000 | 0.99979 |
Los resultados obtenidos de la validación simple de la red neuronal con una población de 300 dinagramas se muestran en la Figura6, Figura7, Figura 8, y Figura9.
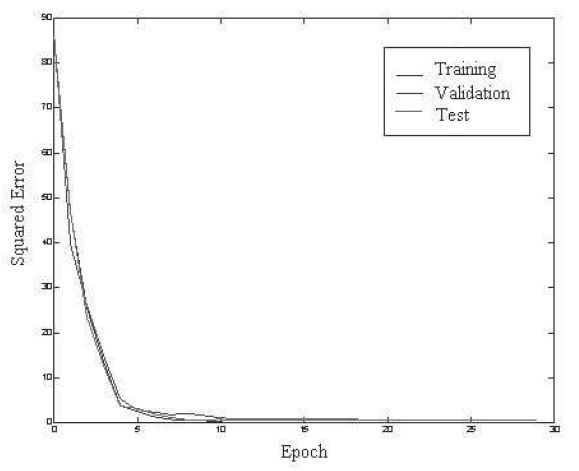
Figura 6. Curva de validación simple
En la Figura 6 se muestra el comportamiento del error durante cada iteración del algoritmo de entrenamiento de la red neuronal para una validación simple. El valor del error aceptable para el entrenamiento es de 0,00001 mse, la curva de validación debe seguir a la curva de entrenamiento por debajo de un margen permisible,de lo contrario se detiene el algoritmo de entrenamiento sin alcanzar el valor de error deseado. La curva de prueba verifica visualmente que la red neuronal se entrenó correctamente, esto se aprecia en la cercanía de las curvas y su comportamiento.La Figura7 hace una ampliación o acercamiento más de tallado de la curva de validación simple.
En la Figura 8 se visualizan las variaciones de los parámetros de mayor interés durante cada iteración del algoritmo de Levenberg Marquardt para el entrenamiento de la red neuronal.
Matlab efectúa su propio cálculo de regresión para el análisis de resultados entregando un valor R para cada curva (entrenamiento, validación y prueba) y la superposición de estas. El cálculo de R2 es el siguiente:
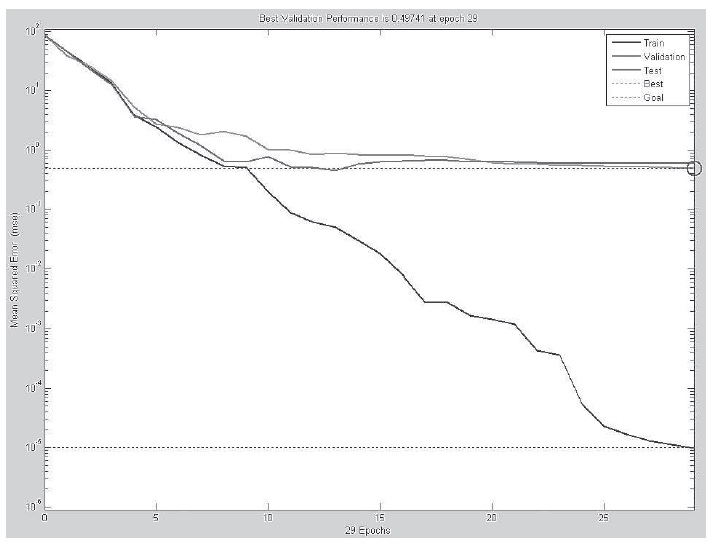
Figura 7. Desempeño para la validación simple
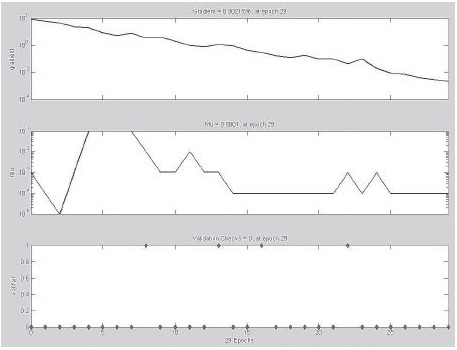
Figura 8. Variación de parámetros durante la validación simple
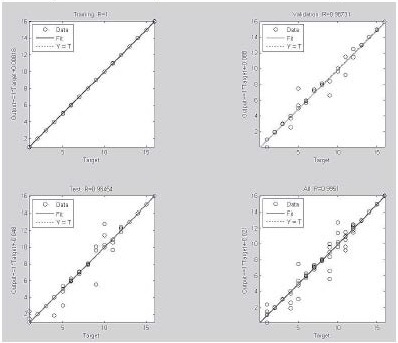
Figura 9. Curvas de regresión para la validación simple
4. Conclusiones
El uso de redes neuronales como herramienta de reconocimiento de patrones de dinagramas permite resultadosmuyfavorables independientemente del númeroytipo de dinagramasutilizados.
Para el diseño dela arquitectura de una red neuronal orientada a la identificación de dinagramas, se propone una red tipo backpropagation cuyo número de neuronas en la primera capa corresponde al número de dinagramas seleccionados como referencia, el número de neuronas en la capa oculta corresponde al número de características extraídas de estos y una única neurona de salida que entrega un valor entero positivo correspondiente a la numeración del dinagrama identificado.
Como aporte a la metodología tradicional aplicada a la caracterización de cartas dinagráficas, en la cual solo se han considerado características geométricas, en este trabajo se consideran características estadísticas de dispersión y tendencia central de los datos. Además se utilizan características geométricas adicionales producto del análisis realizado a losdiferentes patrones.
Utilizando la arquitectura planteada para la red neuronal se evaluaron diferentes algoritmos de entrenamiento, de los cuales el que presentó mejores resultados fue el algoritmo de Levenberg Marquardt con el mejor tiempo y un desempeño de 0,00001 mse.
El software diseñado se construyó pensando en un entorno amigable, de fácil manejo y con la capacidad de brindar la mayor cantidad de información en materia de cartas dinagráficas. Además este software manejado por un experto en dinagramas es una gran herramienta educativa para la capacitación de los operarios y personal involucrado en el manejo de cartas dinagráficas utilizadas en sistemas de bombeo mecánico.
5. Referencias Bibliográficas